A full flight data and video real-time data acquisition system was developed in C++ for the University of Sydney Jabiru Flight Test Laboratory Program.
The FDAS (Flight Data Acquisition System) was able to record and process inertial, air data, magnetometer, GPS, control and camera measurements in real-time.
Providing a first-class test bed for flight parameter identification and vision system and navigation research.
Description
The Jabiru J400 aircraft is a 4 seater light aircraft with a MTOW (Maximum Take-Off Weight) of 700 Kg. It has a cruise speed of 120 kts and a maximum service ceiling of 15,000 ft. The aircraft is used for teaching and research purposes at the University of Sydney. A full flight and visual data acquisition system was purpose built to provide a first class research and teaching test bed. The custom hardware and unique specification required a custom software solution purpose built for the demanding application.

Software was developed in C++ to interface with a number of different hardware sensors and to be able to record all the captured data to disk in real-time.
Sensors and Hardware
- NovAtel ProPak-G2plus SPAN with HG1700 Tactical-Grade IMU (100 Hz)
- Honeywell HMR2300 Magnetometer (100 Hz)
- 3× CMC Allstar 12 GPS Receivers (10 Hz)
- SpaceAge Control 100400 Air Data Probe (500 Hz)
- SpaceAge Control Control Position Transducers (500 Hz)
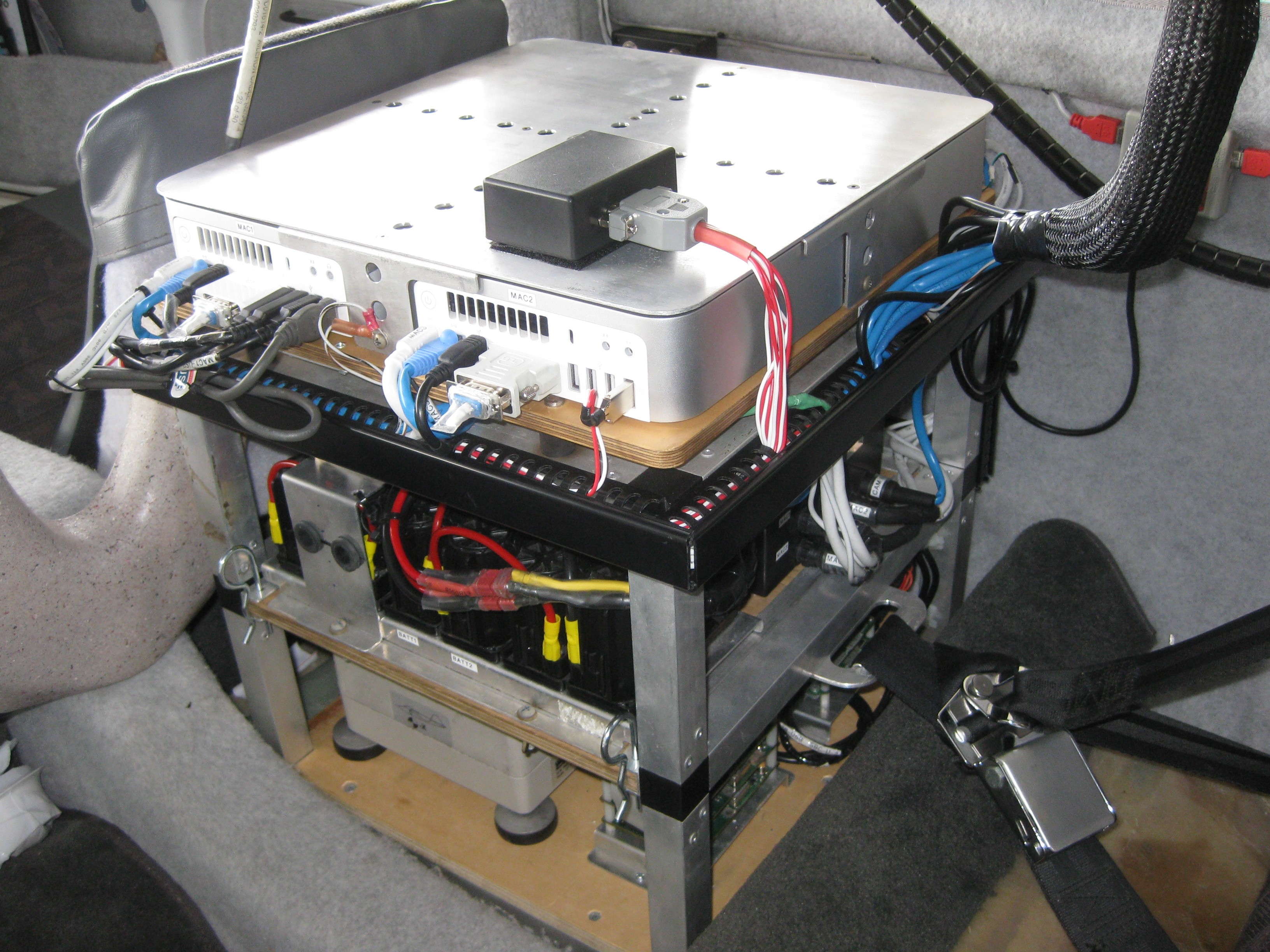
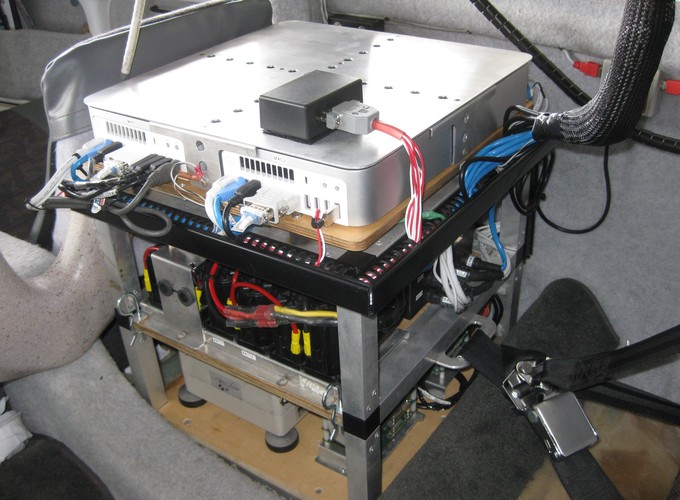
- 4× Mac Mini 2.4 GHz Computers
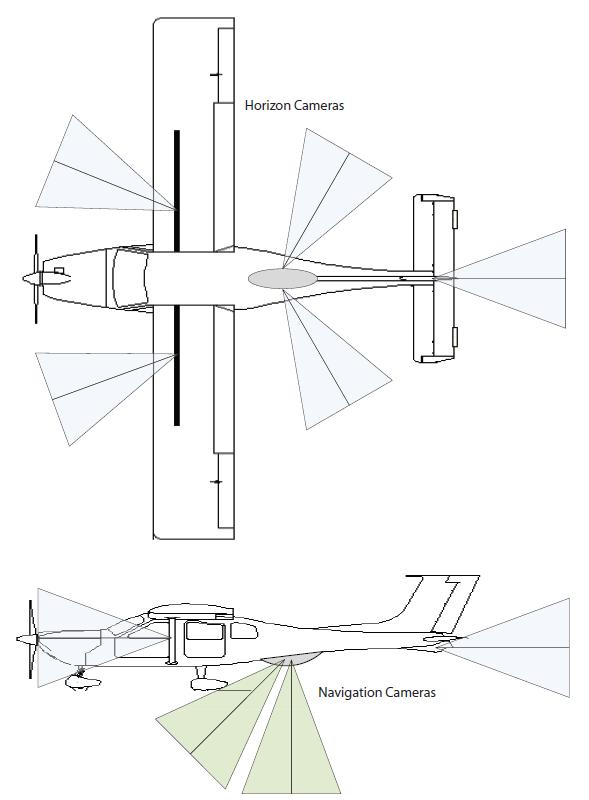
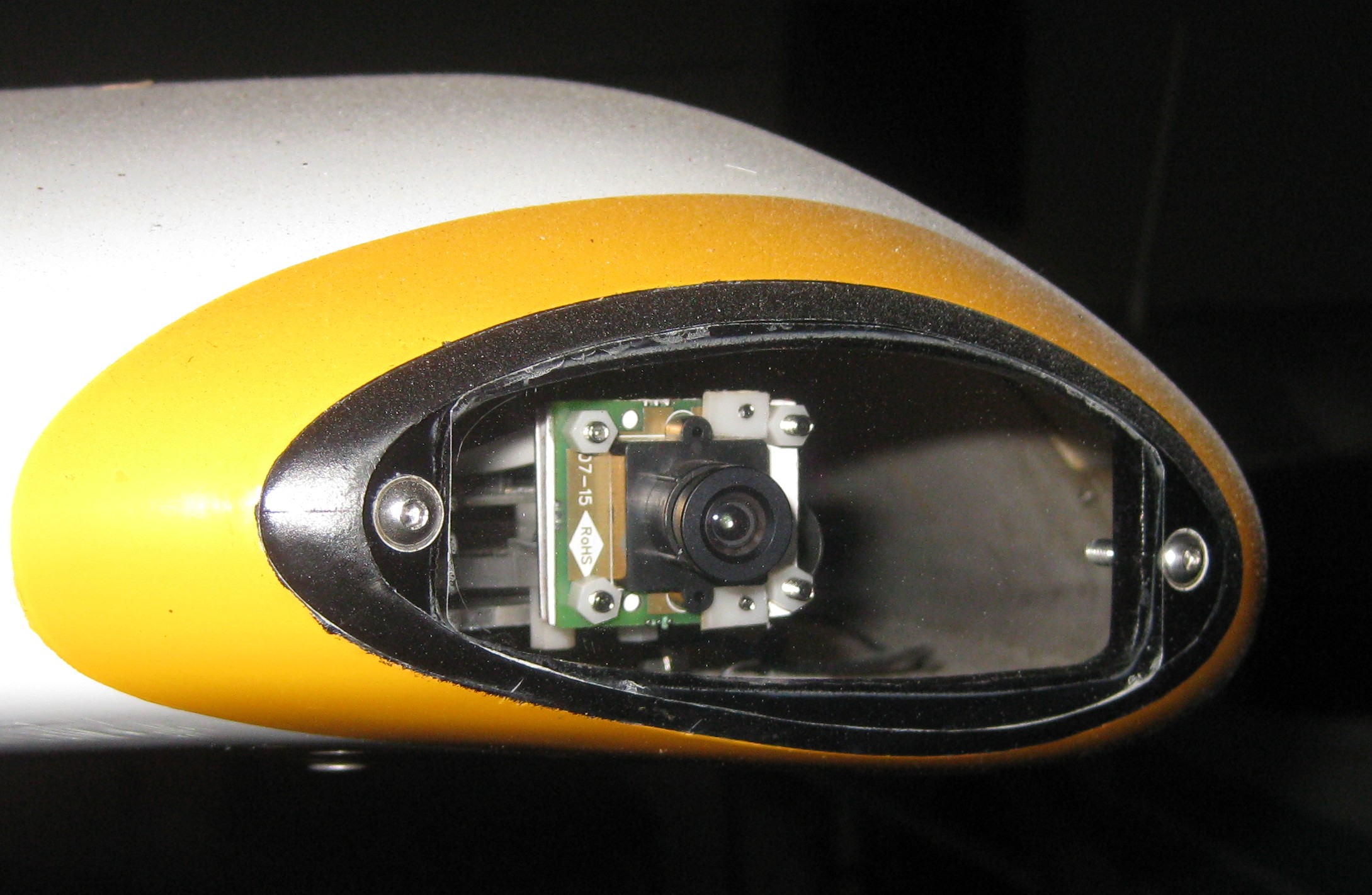
- 5× Colour 640 × 480 Unibrain Fire-i Firewire Cameras (30 Hz)
- 2× Colour 1024 × 768 Prosilica GC-1020C GigE Cameras (25 Hz)
My Role
Lead Development Engineer for the Jabiru Flight Test Laboratory Platform.
University of Sydney. School of Aerospace, Mechanical and Mechatronic Engineering (AMME)
Responsibilities
- Design, construction and installation of a flight test data acquisition system for a Jabiru ultra-light aircraft which can be used for flight dynamics, navigation and control research.
- Responsible for all the real-time C++ software development of the system, including the flight data acquisition, inertial navigation, image processing and computer vision systems.
Skills
- Development of a real-time system capable of accurately time-stamping and recording data at full rate of a number of different sensors using a distributed computing system for resource and load management.
- Multi-threaded C++ Windows application
- Developed Serial, USB, Network, GigE and Firewire interfaces adaptors for the sensors
- USB Driver optimizations to achieve >500+ Hz throughput on USB (USB has a 2ms latency) to ensure real-time data without bufferning or lagged samples.
- Double Buffering Multi-threading disk streaming system was developed to meet the real-time data throughput requirements of the acquisition system
- Extensive health-monitoring, control and status of the distributed computing system and sensor systems
Pictures