Horizon Detection for Attitude Determination
The horizon appearance is a strong visual indication of the attitude of an aircraft, so a vision based system should be able to detect the horizon and use its appearance to extract attitude measurements. Past methods have made the assumption that the horizon is straight, this neglects possible navigational and attitude information. This reserach project investigated developing a real-time capabile horizon detection method which allows for the actual horizon profile shape to be extracted. The horizon profile shape can then be used for attitude determination and other localisation processes.
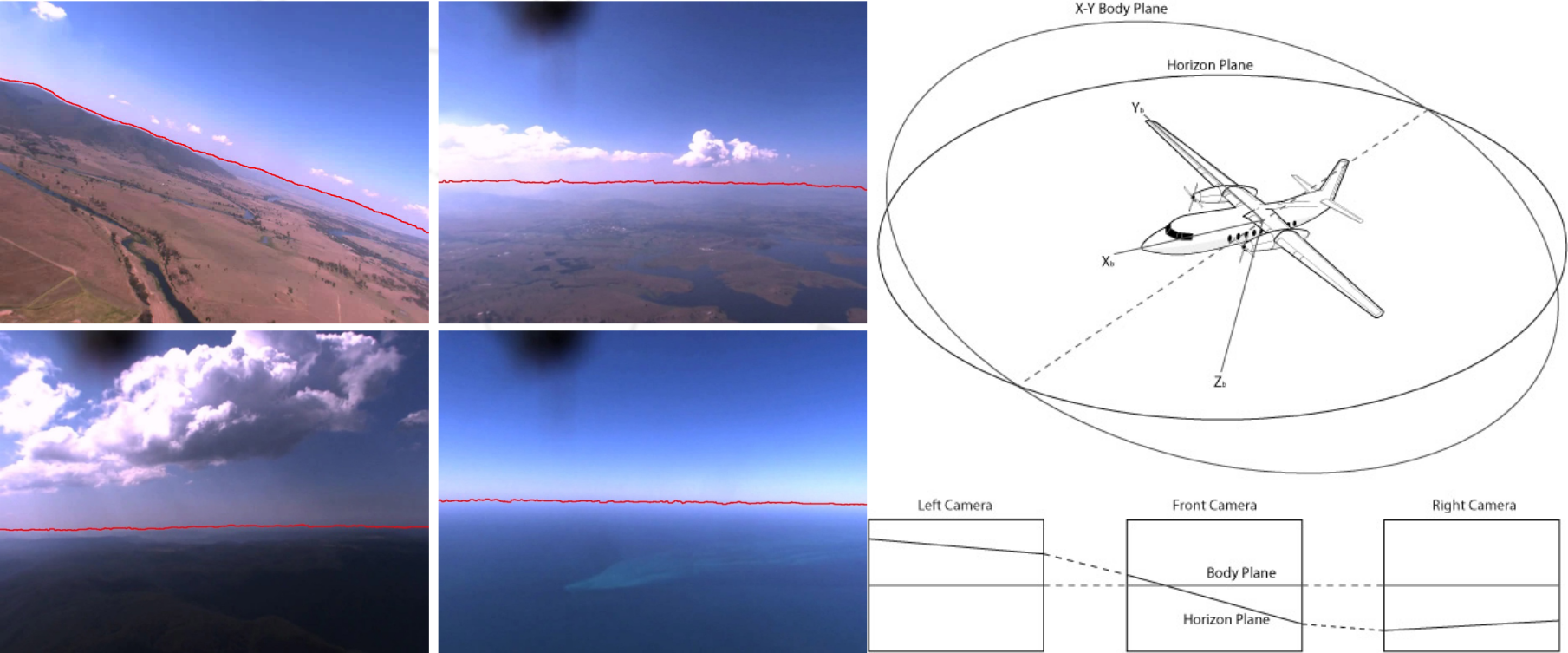
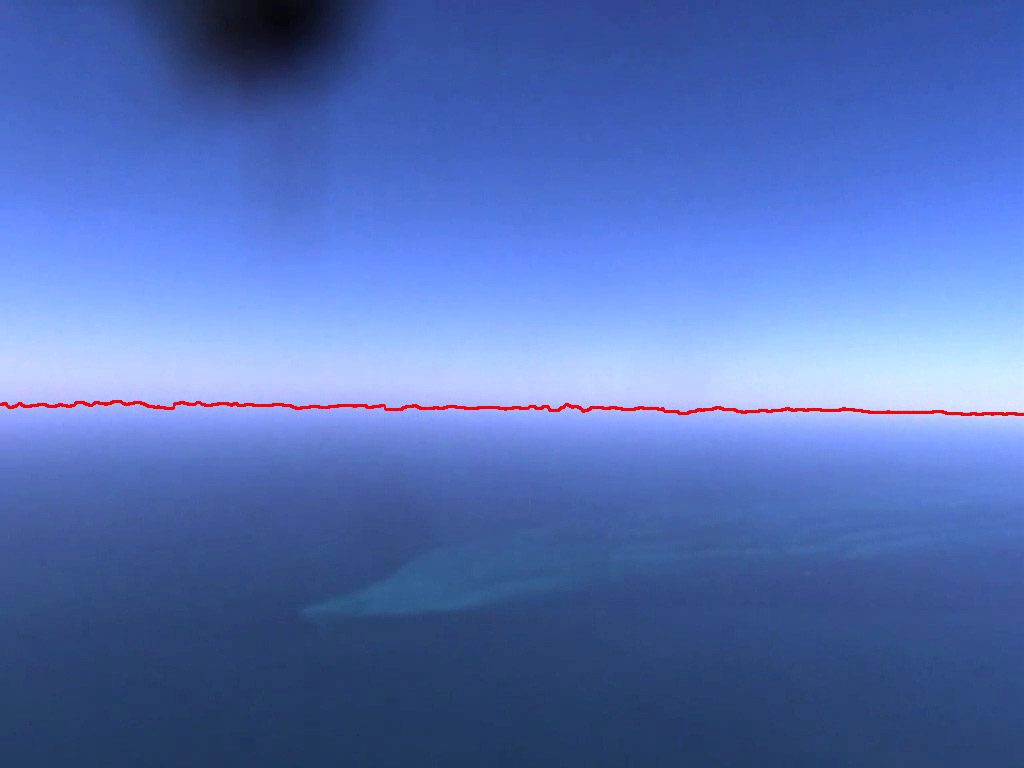
Past methods have either focused on edge based horizon detection or image segmentation based horizon detection methods. These techniques work when the vehicle is close to the ground (such as in the case of MAV/UAVs) and when there is a strong horizon edge. However, these methods fail in whenever these conditions are not satisfied. The developed horizon detection method is able to detect weak and strong horizon responses which allow the algorithm to operate on a wider range of conditions.
The following figures show the results of the horizon detection algorithm. These images can present difficult for past approaches as in most the images the horizon is not strongly defined and the sky and ground regions of the image display similar colour and texture properties.





Horizon-Based Terrain Aided Attitude Determination and Localisation
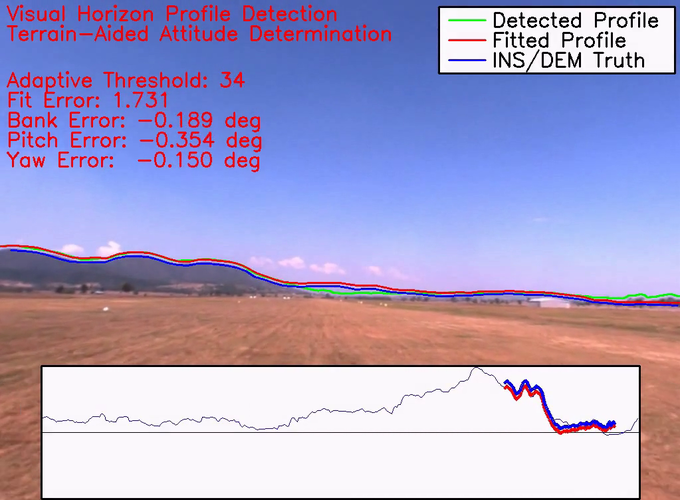
The developed horizon detection algorithm is able to extract the horizon profile shape in the image. The attitude of an aircraft can be calculated from the observed horizon in a camera image if the horizon profile is known. Past methods have made the assumption that the horizon is straight, this ignores the horizon profile which could contain yaw and positional information. This commonly used straight line assumption can introduce attitude biases in the measurements, as both the altitude of the platform and shape of terrain can affect the shape of the horizon profile. Terrain-aided attitude determination allows the observed horizon profile to be matched to the estimated terrain profile, accurately constraining the complete attitude triplet of the platform rather than just the bank and pitch.
Calculating the estimated horizon profile from a digital terrain map can be very computationally expensive. This research project developed an efficient real-time capable method of using terrain-aided horizon profile information to accurately determine the full attitude of the aircraft. This terrain-aided method is capable of producing attitude measurements at least an order of magnitude more precise than the commonly using horizon line method.
Video
A video is available of the terrain-aided attitude determination algorithm operating on a test flight video by clicking on the image below. The extracted horizon profile is matched to the terrain-aided horizon profile to accurately estimate the bank, pitch and yaw of the aircraft.
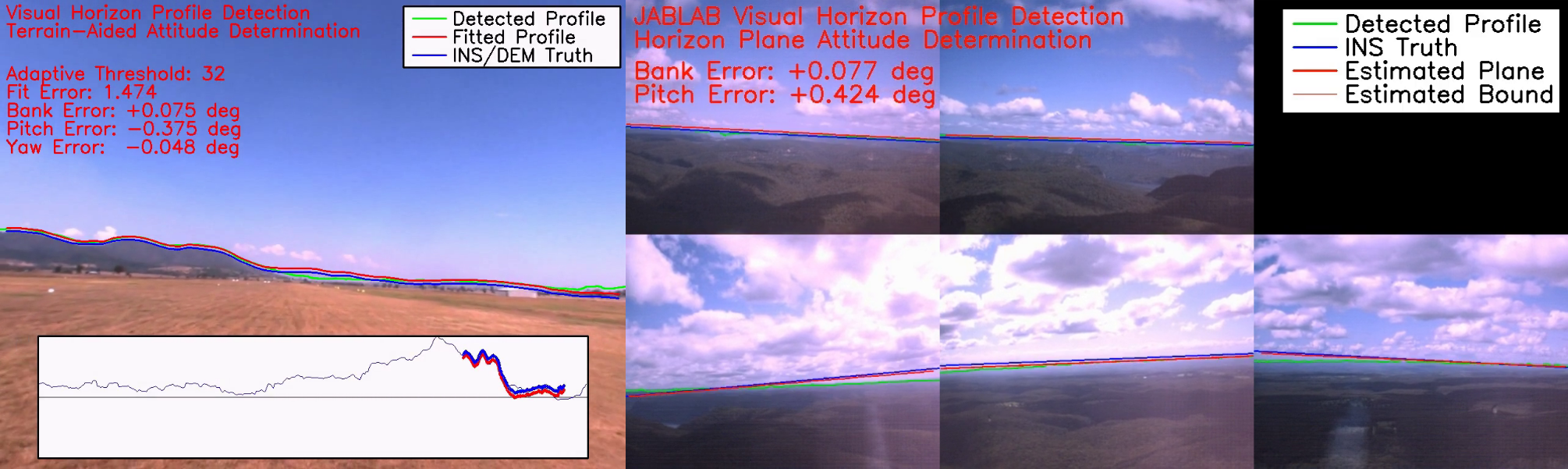
The developed algorithm for efficiently generating the horizon profile from a terrain map has another use other than attitude determination. It can be used inside an optimisation process to find the position of the aircraft as well. Past localisation methods which use the horizon profile take minutes to process a single frame. However, by using the developed horizon profile generation method, a real-time feasible and accurate attitude and position estimation algorithm is realised.
Video
A video is available of the terrain-aided localisation and attitude determination algorithm operating on a simulated video by clicking on the image below. The extracted horizon profile is matched to the terrain-aided horizon profile to estimate attitude and position of the aircraft.