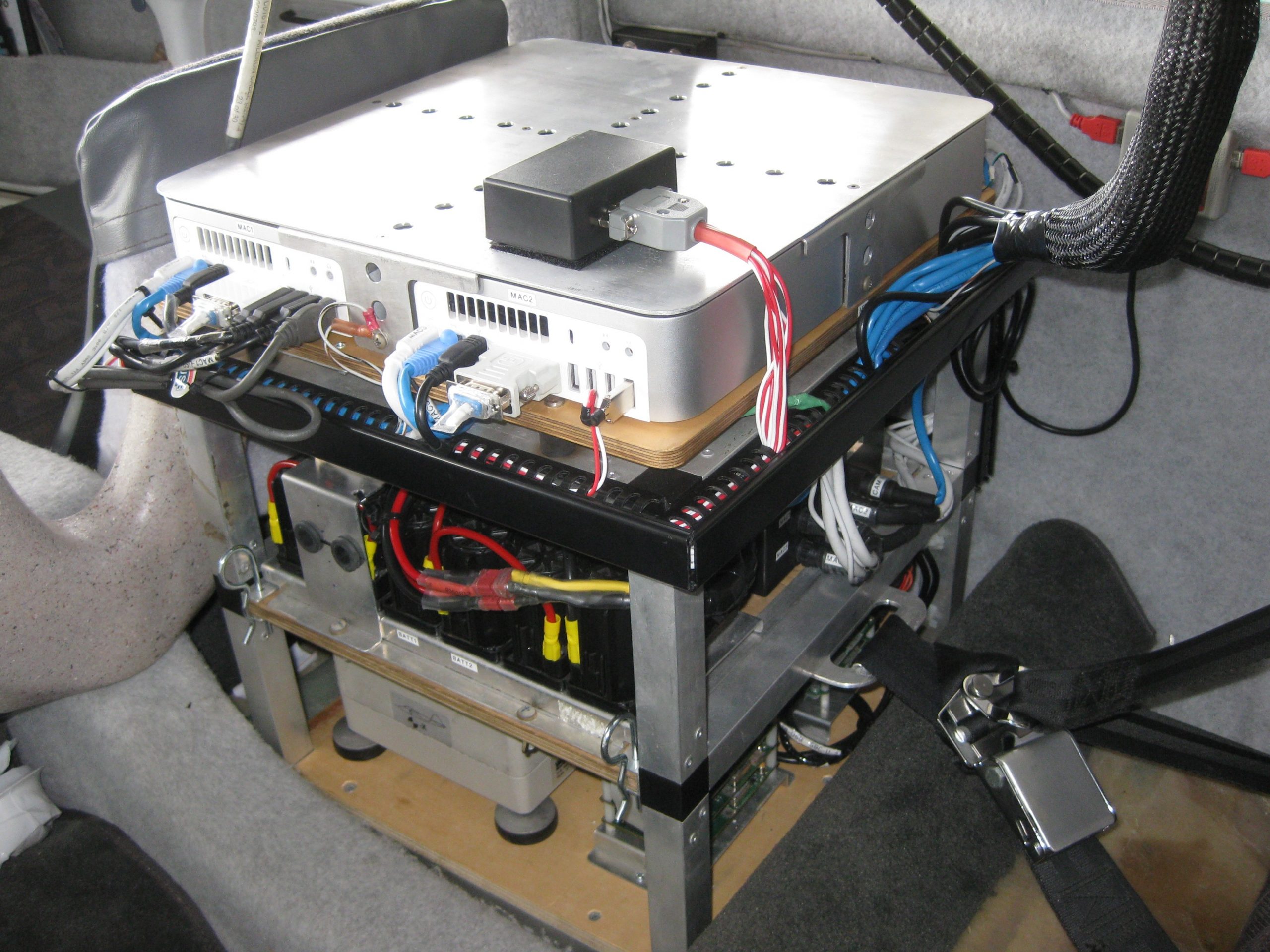
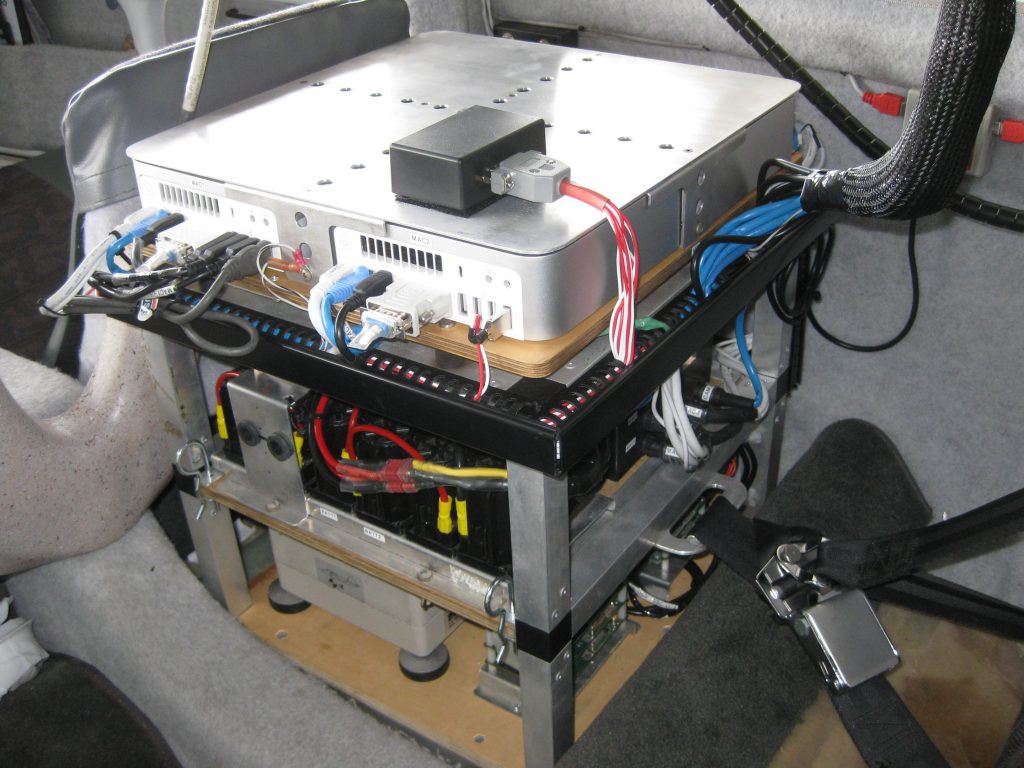
A full flight data and video real-time data acquisition system was developed in C++ for the University of Sydney Jabiru Flight Test Laboratory Program.
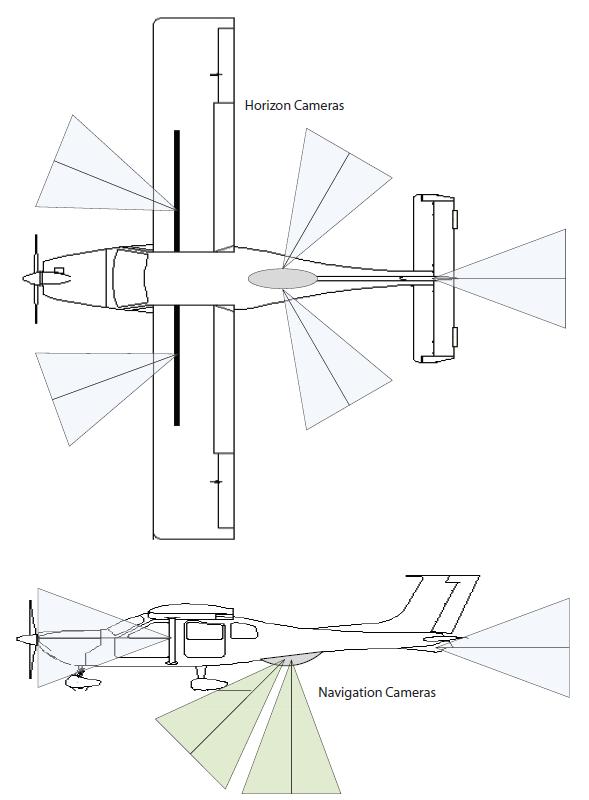
The FDAS (Flight Data Acquisition System) was able to record and process inertial, air data, magnetometer, GPS, control and camera measurements in real-time.
Providing a first-class test bed for flight parameter identification and vision system and navigation research.